Runcam WiFiLink 1¶

Технічні характеристики
| Характеристика | Значення |
|---|---|
| Сенсор зображення | IMX415 | Кут огляду | FOV 160° |
| Діапазон живлення | DC 9-30V (Рекомендовано БЕЖ блок живлення. Непряме живлення від акумулятора Lipo) | Розмір модуля об'єктива | 19*19мм/об'єктив M12/кабель MIPI 200/130мм (кабель MIPI є пропрієтарним, якщо пошкодили - зверніться до виробника) |
| Відстань монтажних отворів | 25.5мм*25.5мм | Розміри плати | 30мм30мм(338Q) 32мм32мм(WIFI) |
| Вага | 30г | Антени | IPEX роз'єм |
| PA | 29дБм (800 мВт) | WiFi чіп | BL-M8812EU2 (5МГц, 10МГц, 20МГц) |
| UARTs | 1 | SOC | SigmaStar SSC338Q |
| Прошивка | ssc338q_fpv_openipc_urllc_aio_nor.tgz |
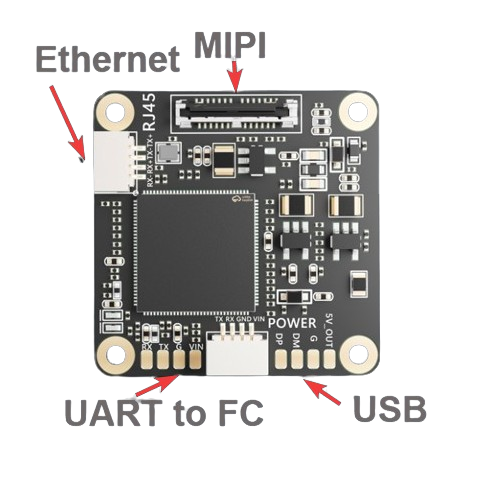
Розташування плати
Motherboard (вверх)
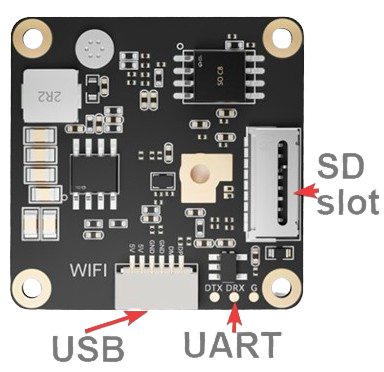
Motherboard (вниз)
Базове налаштування
Для розширеного налаштування перегляньте Додаткове налуштування.
Необхідні компоненти
- Польотний контролер з прошивкою Betaflight, INAV або Ardupilot
- Runcam WiFiLink 1 та додаток Pixelpilot
- WiFi-адаптер RTL8812AU (у комплекті з WiFiLink-G)
- USB-C OTG-адаптер (у комплекті з WiFiLink-G)
- Сучасний смартфон з Android 13 або 14 (з потужним процесором для мінімальної затримки)
- Підключення до Інтернету
Підготовка обладнання
- Під’єднайте антени до Runcam.
- Підключіть 4-контактний шлейф до UART на польотному контролері, що призначений для цифрового VTX (див. зображення), або припаяйте безпосередньо до UART на FC. Увага: кольори провідників можуть збігатися лише на одному кінці – перевірте, щоб GND було до GND, VCC до VCC тощо.
- Вставте відформатовану microSD-картку у слот Runcam (розташований знизу під вентилятором).
- Підключіть комплектний Ethernet-кабель до пристрою.
Отримання gs.key
- Вставте порожню, відформатовану microSD-картку в Runcam (контакти до плати). Для цього може знадобитися розібрати корпус.
- При першому ввімкненні пристрій створить файли
userтаgs.key. Вийміть картку та скопіюйтеgs.keyна ваш VRX (Android, ПК тощо).
Підключення до Android GS
- Встановіть додаток Pixelpilot.
- Скопіюйте файл
gs.keyна смартфон. - Підключіть WiFi-адаптер RTL8812AU до смартфона.
- Запустіть Pixelpilot, коли з’явиться спливаюче вікно.
- Натисніть ⚙️ (шестерня) та встановіть:
- Channel: 161
- Bandwidth: 20
- Виберіть WFB-NG → gs.key та оберіть скопійований файл.
- Увімкніть VTX.
Якщо зображення не з’являється протягом 30 с:
- Перезапустіть Pixelpilot
- Перевірте захисну кришку об’єктива
- Перевірте файл gs.key
- Перезапустіть смартфон та VTX
Коротке підсумування
Після базового налаштування ви отримаєте доступ до доступної цифрової FPV-системи. OSD відображається за замовчуванням на AIR Unit – для налаштування OSD на VRX перегляньте Налаштування OSD. Якщо потрібна офіційна інструкція виробника, дивіться документацію Runcam.